M20为卫导模组,可输出GNSS原始观测量及GNSS解算结果;M21/M22为组合导航模组,内置惯性导航单元IMU及深耦合组合导航算法,不仅可以输出GNSS原始观测量及GNSS解算结果,还可输出IMU原始数据及融合解算结果等。
如需要千亿体育在线游戏丨中国有限公司官网支持帮助,欢迎您联系我们
在复杂的环境中提供更高动态、更好的抗干扰、更高可靠的高精度定位服务。
M20为卫导模组,可输出GNSS原始观测量及GNSS解算结果;M21/M22为组合导航模组,内置惯性导航单元IMU及深耦合组合导航算法,不仅可以输出GNSS原始观测量及GNSS解算结果,还可输出IMU原始数据及融合解算结果等。
M2系列冷启动时间典型值为30s,热启动时间典型值为5s。
对应关系为:uart0-com1;uart1-com2;uart2-com3;uart3-com4。
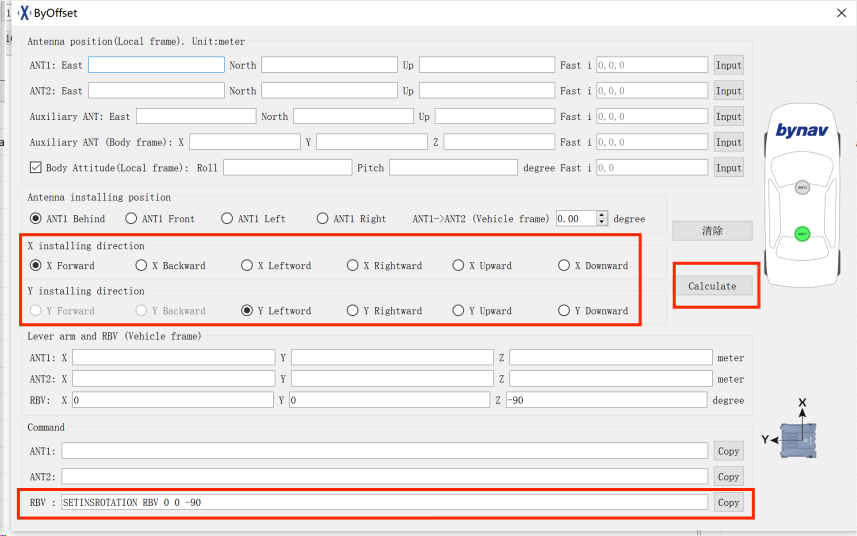
建议使用北云上位机软件BY_CONNECT中ByOffset功能进行RBV的快速计算以及配置:如图所示,在ByOffset中选择北云设备实际安装X轴以及Y轴朝向,点击Calculate按钮将在RBV栏中生成相应RBV配置指令,点击Copy复制后,将指令通过BY_CONNECT指令输入窗口发送至设备,继续发送SAVECONFIG指令保存,以及REBOOT指令重启即可完成配置。
组合导航对准是指姿态初始化的过程:惯性导航系统(INS)通过积分惯性传感器的测量值来计算导航结果,即导航方程的每 一次迭代,都需要利用前一次的位置、速度、姿态等导航参数作为其初始值。因此,在使用INS提供导航结果前,必须要对它进行初始化。INS初始的位置和速度信息需要外部提供,在GNSS/INS组合导航系统中,初始的位置和速度信息是由GNSS接收机提供。此外,还可以采用将INS放置在预先测量的已知位置点附近等方式进行初始化。此时,INS通过外部信息,已经知道了它在外界所处的位置和已有的速度,但仍无法确定的是,当它测量到自身在X轴方向存在加速运动时,或在以Y轴为旋转 轴发生转动时,究竟在外界是朝向哪里加速运动,或在以哪里为轴发生转动。因此,INS还要初始化姿态。
组合导航校准是指坐标系旋转参数RBV值的校准过程:由于安装组合导航系统时,整机坐标系和载体(车辆)坐标系的轴向可能不完全重合,因此不能直接将整机坐标系的朝向作为载体的朝向来实现运动约束,而是要先通过设置RBV参数,来调整整机与载体姿态的相对关系,使得整机坐标系和载体(车辆)坐标系的轴向尽量重合,以实现运动约束。由于设备安装无法保证绝对精确,输入的RBV与实际安装可能会存在偏差,因此需要校准RBV值。
由于安装组合导航系统时,整机坐标系和载体(车辆)坐标系的轴向可能不完全重合,因此不能直接将整机坐标系的朝向作为载体的朝向来实现运动约束,而是要先通过设置RBV (Rotation from Body to Vehicle)参数来调整整机与载体姿态的相对关系,使得整机坐标系和载体(车辆)坐标系的轴向尽量重合以实现运动约束。由于设备安装无法保证绝对精确,输入的RBV与实际安装可能会存在偏差,因此需要校准RBV值。
RBV 误差主要对导航信息中的车体姿态产生影响,也会因杆臂配置的坐标系而对导航中心和方位角产生一定程度的影响。由此产生的影响主要体现在陆地模型中,卫星信号良好时无明显异常,而卫星信号丢失时的误差发散尤为明显,此时由RBV误差产生的姿态和位置偏差将随时间而愈加明显。
天线杆臂测量误差需≤5cm。NHC(Non-Holonomic Constrain)即为非完整性约束,用于针对符合特殊模型假设的载体进行运动约束。依据载体模型在运动方面的限制,与运动假设不相符合的部分都将被视作误差进行约束修正。
两者存在一定区别,INS中航向角Azimuth为车体系坐标中Y轴正半轴与真北的夹角,而Heading则为主天线至从天线的向量与真北的夹角。
需确保设备稳固可靠安装,确保设备、天线和载体三者的相对位置固定不变。设备建议安装在后轮轴中心附近并确保它们与车体刚性连接即可。
定向和RTK原理上是一样的,都是载波相位差分。只是定向时,相当于基准站(主天线)是动态的。
以BESTPOSA为例:

①~⑨分别为标准消息标头、结算状态、定位状态、纬度、经度、海拔高、高程异常值、坐标系ID、可视卫星数等;其他报文字段详细对应关系可参阅《UG016_数据通信接口协议》。
北云板卡默认支持差分协议是RTCM3.3-MSM4,基准站目前只支持播发RTCM3.3-MSM4;
定向精度一般默认指方位角。方位角是主天线到从天线之间形成的矢量与真北之间的夹角。两个天线相位中心之间的长度叫基线长度。当基线长度为1米时,定向精度一般为0.2° RMS 。当基线长度为3米时,定向精度一般为0.067° RMS (也可以描述为3米基线一个密位)。
双天线定向时,会先解算出主天线的位置,然后直接解算出主天线到从天线的矢量结果,包括基线长度、俯仰角和方位角。
差分数据的字节数和接收到的卫星数有关,卫星数越多,差分数据量越大。当基准站收到30颗卫星时,差分数据量约700字节/秒;查看差分数据,可将基准站控制串口数据格式改为RTCM,输出的二进制数显示为乱码,使用HEX显示,若看到数据头为D3 00,则是正确的差分数据格式。
能否进入固定解卫星数只是一个方面,还要看收到卫星的信号质量、卫星分布几何因子、卫星健康状态、多路径干扰等情况。一般而言,单系统至少7颗双频卫星。若双频卫星信号数量少或者接收到的卫星信号的信号质量较差,将影响GNSS板卡或接收机的工作性能,甚至无法正常工作。
在信号处理上,通过并行多相关器抑制多径误差,并给出信号多径指示。在定位解算上,结合多径指示、信号强度、卫星仰角对观测数据加权解算。此外,利用部分模糊度搜索来排除多径严重卫星对解算的影响。
复杂城市环境中,板卡通过自适应环路跟踪来快速响应信号的遮挡、金属反射等外部环境引起的信号突变,保持信号的持续稳定跟踪和信号中断后的迅速恢复。目前最大的技术优势就是动态抗遮挡性能。